
X-Y Stage
UNU MP20을 사용하여 X-Y Stage를 만들었습니다. X-Y Stage는 여러 용도로 사용할 수 있고
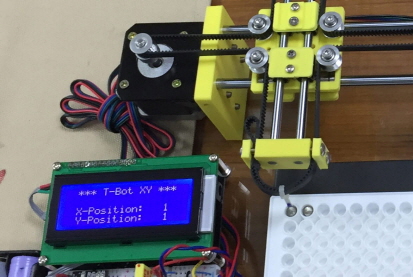
여기서는 시료를 자동으로 처리하기 위한 목적으로 만들었습니다. 필요한 재료은 Step Motor와 timming belt(검은색 띠)를 사용하기 위한
timming gear(16 tooths)와 idling pully와 직선운동용 연마봉(지름: 6 mm, 5 mm)과 Ball Bush를 사용하였습니다.
그리고 3-D 프린터를 사용하여 각 부품들을 고정하기 위하여 받침대(사진의 노랑색 플라스틱들)를 만들어 사용하였습니다.
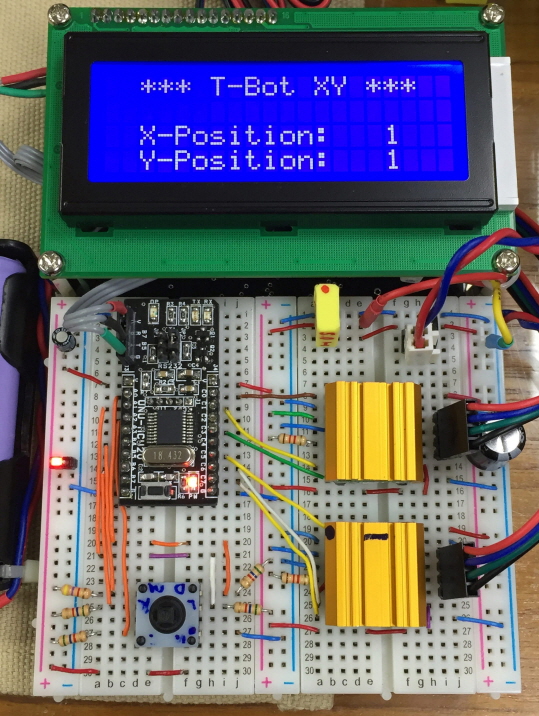
위 왼쪽 그림은 빵판에 UNU MP20에 A4988 스텝모터드라이브(오른쪽 두개의 금색), 그리고 조이스틱 스위치 (왼쪽 아래 스위치) 를 연결하고 프로그램을 작성하고 그 X-Y Stage의 머리 부분의 위치를 LCD에 표시 할 수 있도록 하였습니다. LCD와 UNU MP20과의 연결은 UNU MPLCD를 사용하였습니다. 그리고 그 아래에 96-well plate를 두고 시료 하나하나를 찾아가도록 하였습니다(아래 동영상 참고).
X-Y Stage의 구조는 StepMotor를 양쪽에 두고 두 StepMotor를 조절하여 Stage를 움직이도록 하였습니다. 이러한 방식(T-Bot)은 일반적으로 사용하는 Stage가 움직이는 X-Y Stage에 비하여 구조가 간단한 장점이 있습니다. X-Y Stage의 머리 부분을 목적에 맞게 바꾸면 다양한 곳에 적용 할 수 있을거라 생각합니다. 일반적으로 3-D 프린터의 헤드 부분에 사용하며 플로터러도 활용합니다.
T-Bot의 원리는 아래 그림과 같이 왼쪽 스텝모터는 시계방향으로, 오른쪽 스텝모터는 반시계 방향으로 회전 할 경우 첫 번째 그림처럼 스테이지는 윗방향으로 움직이며 서로 반대의 경우 그림의 왼쪽 아래 처럼 스테이지는 아랫쪽으로 움직입니다. 마냑 두 스텝모터가 반시계방향으로 둘다 움직인다면 그림이 오른쪽 위 처럼 스테이지는 오른쪽으로 움직이며 반대의 경우 그림의 오른쪽 아래처럼 스테이지는 왼쪽으로 움직입니다.

ref) http://www.buildlog.net/blog/2017/10/the-midtbot-a-new-flavor-of-h-bot
위 왼쪽 그림은 빵판에 UNU MP20에 A4988 스텝모터드라이브(오른쪽 두개의 금색), 그리고 조이스틱 스위치 (왼쪽 아래 스위치) 를 연결하고 프로그램을 작성하고 그 X-Y Stage의 머리 부분의 위치를 LCD에 표시 할 수 있도록 하였습니다. LCD와 UNU MP20과의 연결은 UNU MPLCD를 사용하였습니다. 그리고 그 아래에 96-well plate를 두고 시료 하나하나를 찾아가도록 하였습니다(아래 동영상 참고).
X-Y Stage의 구조는 StepMotor를 양쪽에 두고 두 StepMotor를 조절하여 Stage를 움직이도록 하였습니다. 이러한 방식(T-Bot)은 일반적으로 사용하는 Stage가 움직이는 X-Y Stage에 비하여 구조가 간단한 장점이 있습니다. X-Y Stage의 머리 부분을 목적에 맞게 바꾸면 다양한 곳에 적용 할 수 있을거라 생각합니다. 일반적으로 3-D 프린터의 헤드 부분에 사용하며 플로터러도 활용합니다.
T-Bot의 원리는 아래 그림과 같이 왼쪽 스텝모터는 시계방향으로, 오른쪽 스텝모터는 반시계 방향으로 회전 할 경우 첫 번째 그림처럼 스테이지는 윗방향으로 움직이며 서로 반대의 경우 그림의 왼쪽 아래 처럼 스테이지는 아랫쪽으로 움직입니다. 마냑 두 스텝모터가 반시계방향으로 둘다 움직인다면 그림이 오른쪽 위 처럼 스테이지는 오른쪽으로 움직이며 반대의 경우 그림의 오른쪽 아래처럼 스테이지는 왼쪽으로 움직입니다.
ref) http://www.buildlog.net/blog/2017/10/the-midtbot-a-new-flavor-of-h-bot